What is 'analog Not analog'?
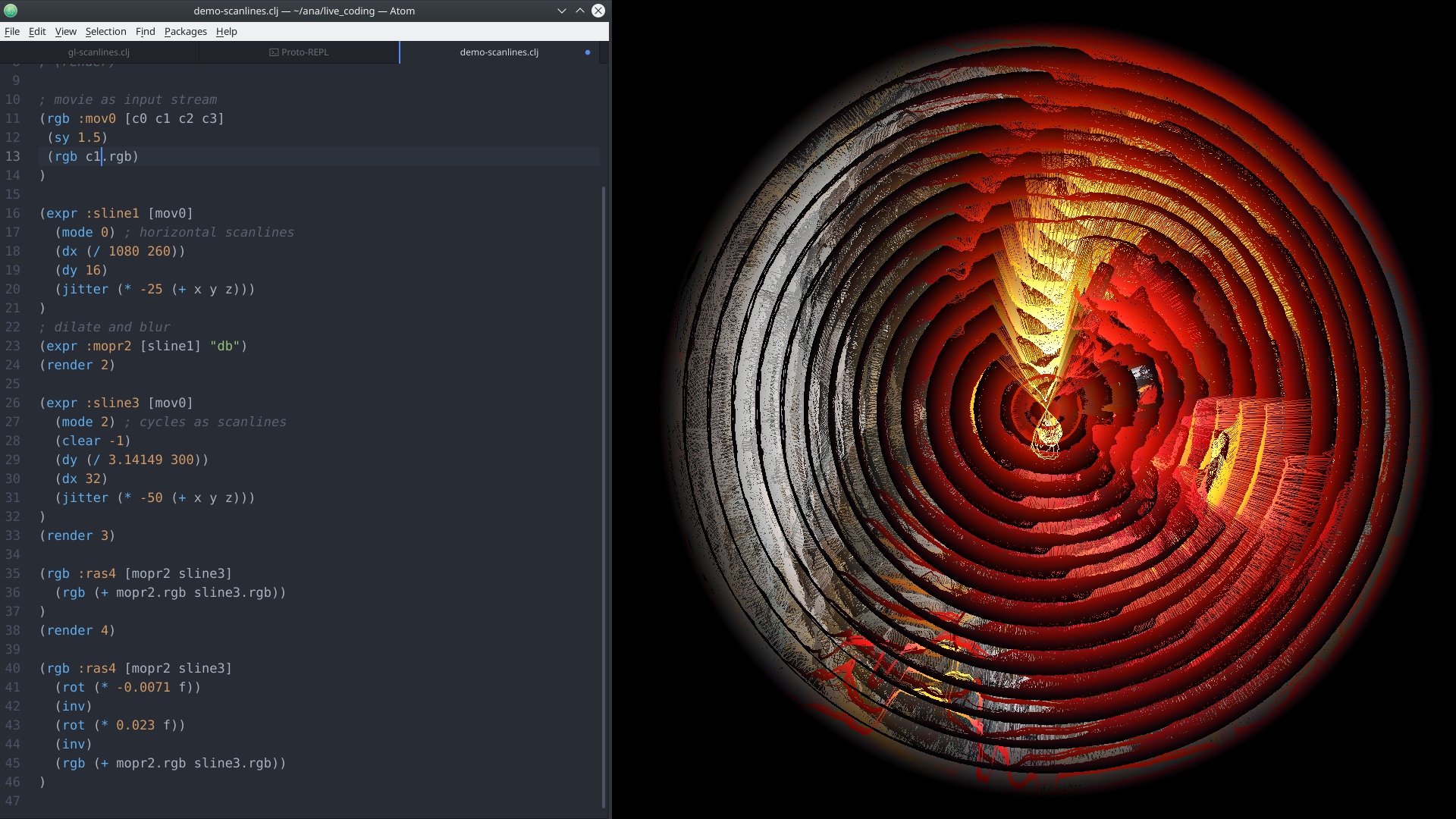
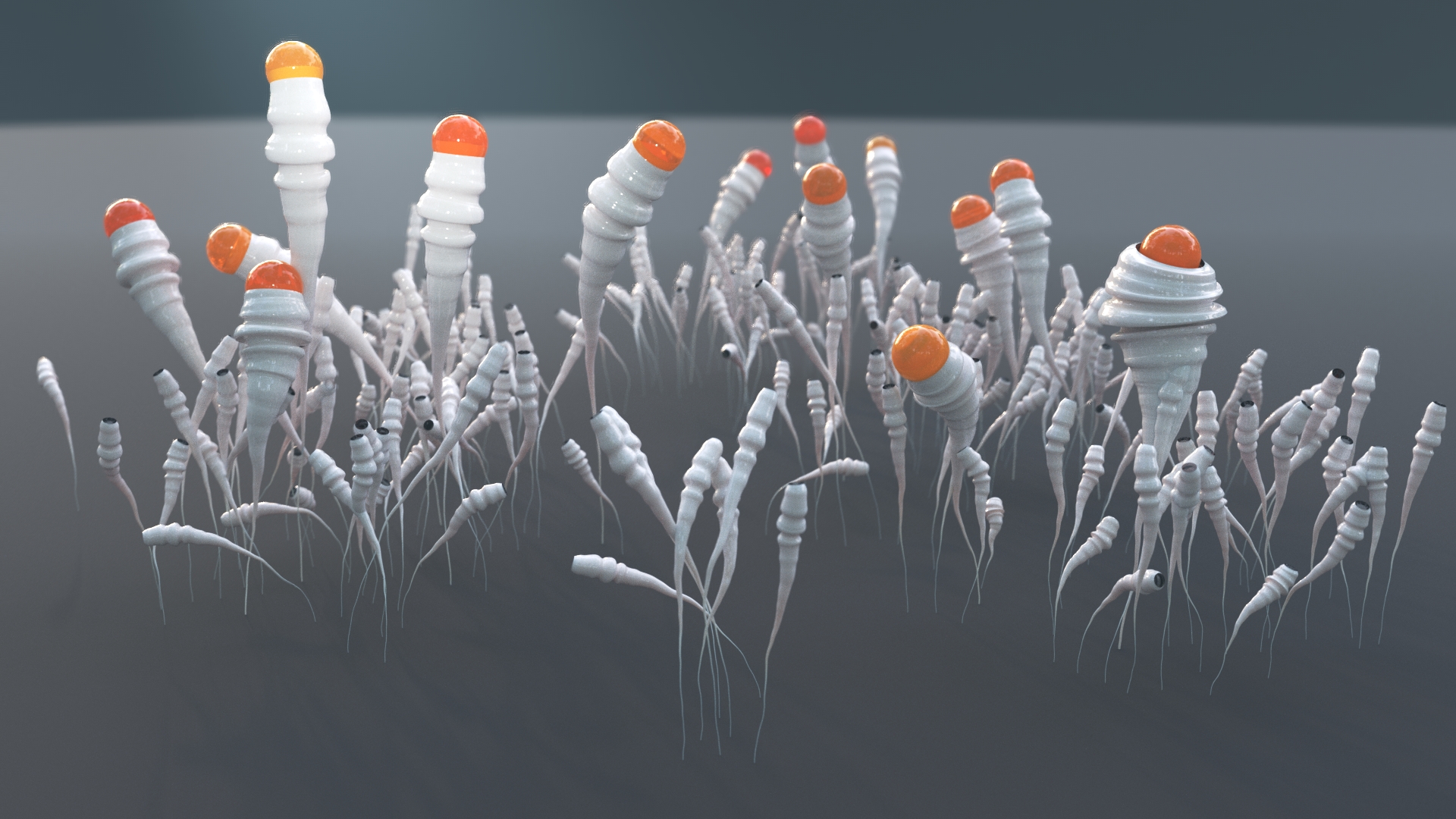
aNa is a live coding system for visuals. aNa is an approach about inserting textures and shapes from the natural environment into computer generated graphics. aNa tries to reduce the difference between analog video technology, glitch art and digital animation. The aNa display server can mix generative code fragments with different inputs channels in real-time: a WEB cam, a microphone, movie files, image sequences, a joystick or data received from Open Sound Control. read more
The 'analog Not analog' cookbook.
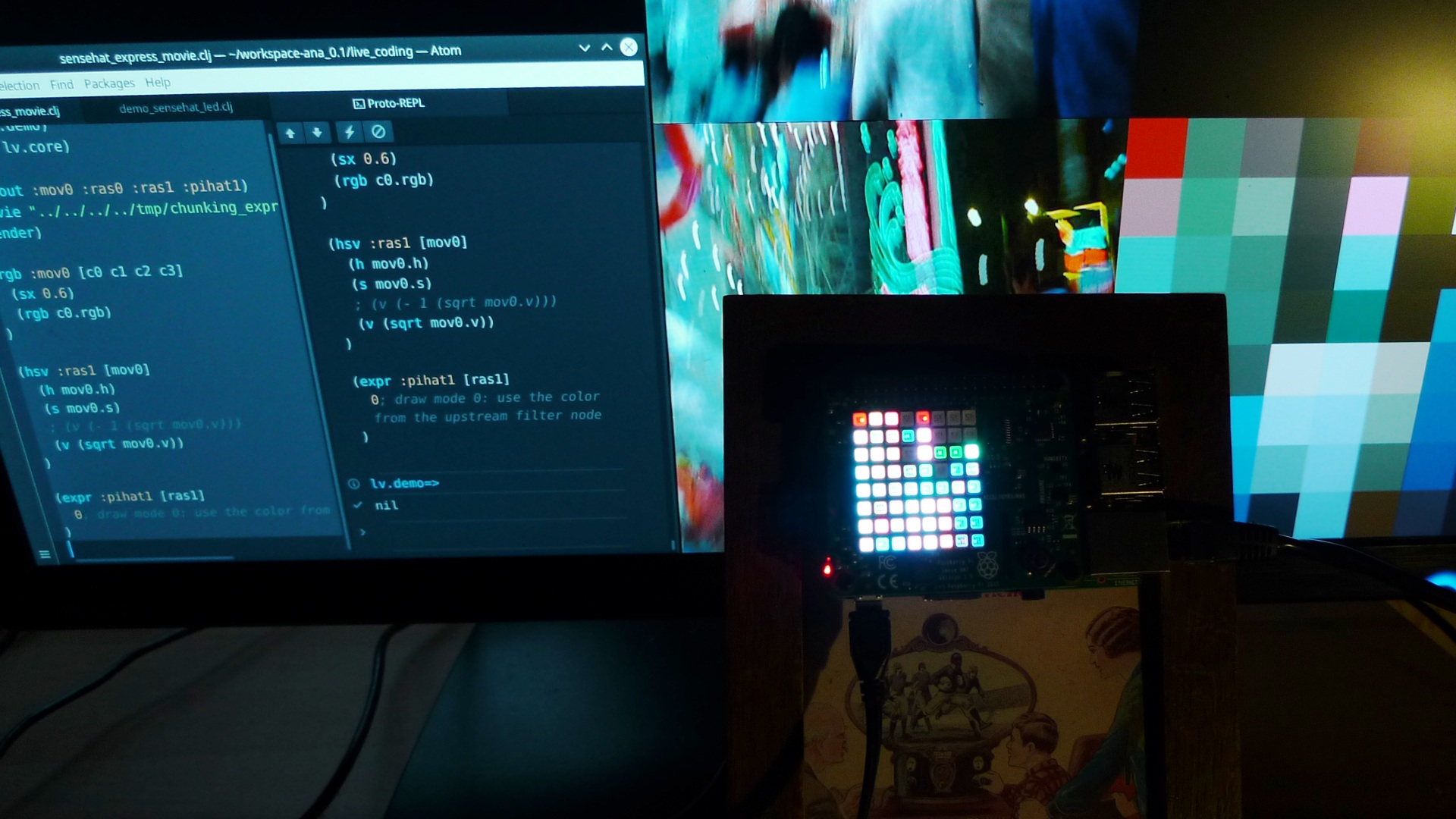
Here you will find sketches showing how to work with aNa. These examples also include strategies how to couple aNa with other programs via Open Sound Control (OSC). Using SuperCollider as an example, but aNa open to the whole OSC world. read more